Wenn Servicetechniker einer Dienstleistungsfirma beauftragt werden, ein Ersatzteil zu tauschen (Auftrag, Bestellung) oder eine Wartung für Fertigungs-, Beförderungs- (Rolltreppen, Aufzüge) oder gebäudetechnische Anlagen (Heizung, Lüftung, Sanitär) durchzuführen, müssen diese vom Auftraggeber in die Lage versetzt werden, an den Installationsort der jeweiligen Anlagen zu gelangen. Dafür benötigen sie neben der genauen Adresse und Raumnummer, auch den Weg zum Leistungsort. Insbesondere bei großen Firmen mit zentralem Eingang und umfassenden Gebäude- und Flächenstrukturen (wie bspw. produzierende Industrie, Krankenhäuser, Logistik) sind die Herausforderungen dafür sehr groß, so dass häufig wertvolle Zeit verloren geht, bis der Dienstleister sich auf einem unbekannten Gelände zurechtfindet und zum Einsatzort gelangt. Bedingt durch die hohe Frequenz von solchen Terminen haben die Fachabteilungen des Auftraggebers in der Regel keine ausreichenden Personalkapazitäten, um die Dienstleister zu begleiten und an den Einsatzort zu führen. Ähnliches gilt für den Bereich Security- und Wachschutz, die ortgebunden sind und ihren Arbeitsbereich nicht verlassen dürfen. Auch ein Lösungsansatz bspw. mit GIS-Systemen ist hier problematisch, da es sich um statische Lösungen handelt und die Interaktion des Technikers nicht berücksichtigen bzw. auch ein Routing nicht darstellen können.
Mit dem FuE-Projekt ServiceTechNavigator soll ein Servicetechniker innerhalb einer Industrieliegenschaft mit einem vorliegenden BIM-Modell zu seinem Einsatzort und zurück navigiert werden. Hierzu wird er beim Empfang ein Tablet ausgehändigt bekommen, auf welchem die Software ServiceTechNavigator läuft und welches er bei seinem gesamten Einsatz bei sich tragen muss. Hierrüber werden ihm alle wichtigen Informationen angezeigt, welche ihm bei seinem Weg zum Einsatzort, während der Ausführung seiner Tätigkeit und zurück zum Empfang führen sollen. Um eine Navigation des Servicetechnikers zu ermöglichen, muss dessen Trajektorie innerhalb des Standortes während seines gesamten Einsatzes bestimmt werden.
Innovation und Benefits:
Die Innovation des ServiceTechNavigator liegt darin, dass es eine Orientierung und Navigation über geometrische Merkmale ermöglicht. Anders als heutige funkbasierte Lösungen (aktive Ortsbestimmung über Trigonometrie) basiert die Projektidee auf einem passiven Ansatz und benötigt somit keine Eingriffe in die Infrastruktur bzw. das Ausrüsten von Funkankern oder Beacons. Der Ansatz der optischen Navigation soll in einer App-Umgebung erfolgen, die die internen Sensoren moderner Mobilfunkgeräte nutzt und zur Orientierung auf vorhandene CAD-/BIM-Modelle (Referenzpunkte aus dem Modell und der optischen Erfassung) zurückgreifen kann. Ein weiterer Vorteil besteht in der Verwendung von angereicherten Informationen zu den Gehflächen und Merkmalen, sodass die angedachte Lösung auch eine barrierefreie Nutzung unterstützt, da sie Hindernisse und Höhenlagen erkennt. Für die unterschiedlichen Stakeholder ergeben sich nachfolgend aufgeführte Verbesserungen durch die Einführung des ServiceTechNavigator:
| Allgemeinheit | Investor und Betreiber | Servicetechniker als Endanwender | Anbieter der App | CAFM-Hersteller |
| höhere Verfügbarkeit von Anlagen durch kürzere Standzeiten | geringere Kosten bei Anfahrt und Wegekosten, Reduktion von Betriebsstörungen und -ausfällen, Digitalisierung der Wartung und Instandhaltung | Navigator erlaubt ein schnelles Auffinden des Einsatzortes (Wartezeiten) und beugt eventuellen Verletzungen und Unfälle vor (Sicherheit- und Arbeitsschutz) | Erweiterung des bisherigen Geschäftsmodells in Richtung Wartung und Instandhaltung, Einbeziehung neuer Branchen | Erweiterung der bestehenden Produktpalette, Optimierung von Wartungsprozessen, Erschließung neuer Märkte mittels einer neuen Basistechnologie gerade im Bereich der kritischen Infrastruktur |
Technisches Konzept:
Bei der angestrebten Entwicklung handelt es sich um ein hochvernetztes, datenintensives System, das fortschrittliche Technologien und maßgeschneiderte Lösungen kombiniert. Besonderer Wert wird auf die Datenakquisition von zahlreichen Geräten und Sensoren, die Datenverarbeitung so-wohl auf dem Gerät als auch in der Cloud sowie auf die Datenkompatibilität und -transformation auf verschiedenen Ebenen gelegt. Ein vereinfachtes Strukturbild verdeutlicht die Hauptkomponenten der Lösung.
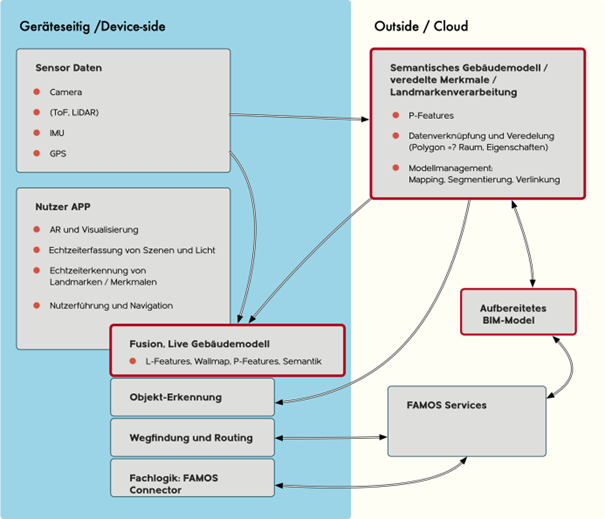
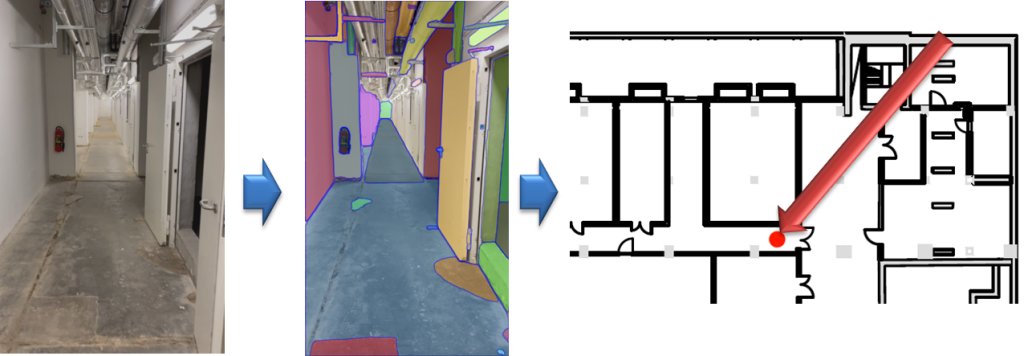
Umgebungsdaten (Sensordaten) werden mithilfe mobiler Geräte erfasst und nach deren Verarbeitung / Veredelung für Lokalisierung, Navigation und Augmented Reality (AR) genutzt. Die Lösung garantiert eine bidirektionale Datenkompatibilität. Durch innovativ aufbereitete BIM-Modelle und deren Verknüpfung mit dispositiven Daten entsteht ein Referenzmodell der statischen Umge-bungs- und Auftragsstrukturen. Eine Veredelung zu semantischen Gebäudemodellen, angereichert mit besonderen Merkmalen und KI-basierter Landmarkenverarbeitung, bilden das gemeinsame Herzstück der Lösung.
Die technologischen Neuerungen dieser Entwicklung verknüpfen BIM-Daten, Sensordaten und maschinelles Lernen für eine präzise Navigation in Innenräumen. Die Verbindung von semantischer Segmentierung, Faktorgraphen-basierter Fusion und topologischer Signalverarbeitung ermöglicht eine genaue Positionsbestimmung, selbst bei Unsicherheiten und raumbezogenen Veränderungen. Durch die Einbindung von Augmented Reality zur Echtzeit-Darstellung von Informationen wird die klassische Navigations-App um eine innovative visuelle Dimension erweitert. Das Zusammenspiel dieser Datenverarbeitungsschritte führt zu zahlreichen technischen Herausforderungen und Neuerungen.